
Pose.Identity
static Pose Identity{ get }
Description
A default, empty pose. Positioned at zero, and using Quat.Identity for orientation.
Examples
Identity Pose
The identity pose is a Pose at (0,0,0) facing Forward, which in
StereoKit is a direction of (0,0,-1) represented by a Quaternion of
(0,0,0,1). Note that a Quaternion of (0,0,0,0) is invalid, and can
cause problems with math, so using default or an empty
new Pose() with this struct can result in bad math results.
Pose.Identity is a good default to get used to!
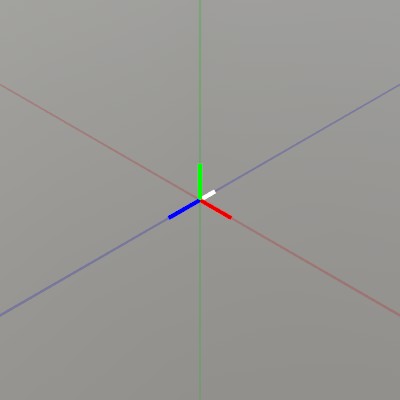
Note that Lines.AddAxis here shows the Pose orientation by
drawing the pose local X+ (red) Y+ (blue) Z+ (green) axis lines in
the positive direction, and Forward in white.
Pose pose = Pose.Identity;
Lines.AddAxis(pose);
// Show the origin for clarity
Lines.Add(V.XYZ(-1,0,0), V.XYZ(1,0,0), new Color32(100,0,0,100), 0.0005f);
Lines.Add(V.XYZ(0,-1,0), V.XYZ(0,1,0), new Color32(0,100,0,100), 0.0005f);
Lines.Add(V.XYZ(0,0,-1), V.XYZ(0,0,1), new Color32(0,0,100,100), 0.0005f);
Found an issue with these docs, or have some additional questions? Create an Issue on Github!