
struct Pose
Pose represents a location and orientation in space,
excluding scale! CAUTION: the default value of a Pose includes a
completely zero Quat, which can cause problems. Use Pose.Identity
instead of new Pose() for creating a default pose.
Instance Fields and Properties
| Vec3 Forward | Calculates the forward direction from this pose. This is done by multiplying the orientation with Vec3.Forward. Remember that Forward points down the -Z axis! |
| Quat orientation | Orientation of the pose, stored as a rotation from Vec3.Forward. |
| Vec3 position | Location of the pose. |
| Ray Ray | This creates a ray starting at the Pose’s position, and pointing in the ‘Forward’ direction. The Ray direction is a unit vector/normalized. |
| Vec3 Right | Calculates the right (+X) direction from this pose. This is done by multiplying the orientation with Vec3.Right. |
| Vec3 Up | Calculates the up (+Y) direction from this pose. This is done by multiplying the orientation with Vec3.Up. |
Instance Methods
| Pose | Basic initialization constructor! Just copies in the provided values directly. |
| ToMatrix | Converts this pose into a transform matrix, incorporating a provided scale value. |
| ToString | A string representation of the Pose, in the format of “position, Forward”. Mostly for debug visualization. |
Static Fields and Properties
| Pose Identity | A default, empty pose. Positioned at zero, and using Quat.Identity for orientation. |
Static Methods
| Lerp | Interpolates between two poses! It is unclamped, so values outside of (0,1) will extrapolate their position. |
| LookAt | Creates a Pose that looks from one location in the direction of another location. This leaves “Up” as the +Y axis. |
Examples
Identity Pose
The identity pose is a Pose at (0,0,0) facing Forward, which in
StereoKit is a direction of (0,0,-1) represented by a Quaternion of
(0,0,0,1). Note that a Quaternion of (0,0,0,0) is invalid, and can
cause problems with math, so using default or an empty
new Pose() with this struct can result in bad math results.
Pose.Identity is a good default to get used to!
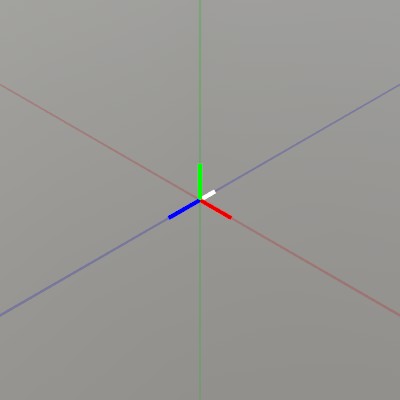
Note that Lines.AddAxis here shows the Pose orientation by
drawing the pose local X+ (red) Y+ (blue) Z+ (green) axis lines in
the positive direction, and Forward in white.
Pose pose = Pose.Identity;
Lines.AddAxis(pose);
// Show the origin for clarity
Lines.Add(V.XYZ(-1,0,0), V.XYZ(1,0,0), new Color32(100,0,0,100), 0.0005f);
Lines.Add(V.XYZ(0,-1,0), V.XYZ(0,1,0), new Color32(0,100,0,100), 0.0005f);
Lines.Add(V.XYZ(0,0,-1), V.XYZ(0,0,1), new Color32(0,0,100,100), 0.0005f);
Lerping Poses

Here we construct two Poses, one using a position + direction
constructor, and one using a from -> to LookAt function. Both are
valid ways of constructing a Pose, check out the Quat
functions for more tools for creating Pose orientations!
After that, we’re just blending between these two Poses with a
Pose.Lerp, and showing the result at 10% intervals.
Pose a = new Pose(0, 0.5f, -0.5f, Quat.LookDir(1,0,0));
Pose b = Pose.LookAt(V.XYZ(0,0,0), V.XYZ(0,1,0));
for (int i = 0; i < 11; i++) {
Pose p = Pose.Lerp(a, b, i/10.0f);
Lines.AddAxis(p, 0.05f);
}
// Show the origin for clarity
Lines.Add(V.XYZ(-1,0,0), V.XYZ(1,0,0), new Color32(100,0,0,100), 0.0025f);
Lines.Add(V.XYZ(0,-1,0), V.XYZ(0,1,0), new Color32(0,100,0,100), 0.0025f);
Lines.Add(V.XYZ(0,0,-1), V.XYZ(0,0,1), new Color32(0,0,100,100), 0.0025f);
Draw Pose
Having a raw and malleable position/orientation available is great,
but with Pose.ToMatrix, you can also quickly turn a Pose into a
Matrix for use with drawing functions or other places where
Matrix transforms are needed! ToMatrix also has overloads to
include a scale, if one is available.

Pose pose = new Pose(0,0,-0.5f, Quat.FromAngles(30,45,0));
float scale = 0.5f;
Mesh.Cube.Draw(Material.Default, pose.ToMatrix(scale));
Pose Directions
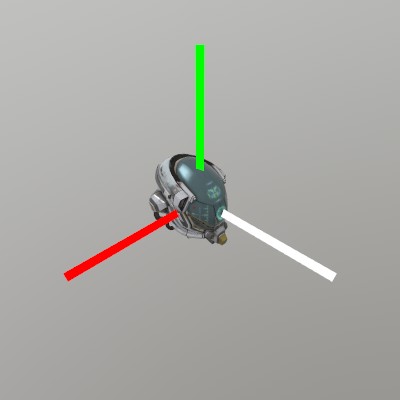
Pose provides a few handy vector properties to help working with
Pose relative directions! Forward, Right, and Up are all
derived from the Pose’s orientation, and represent the -Z, +X and
+Y directions of the Pose.
Pose p = new Pose(0,0,-0.5f);
model.Draw(p.ToMatrix(0.03f));
Lines.Add(p.position, p.position + 0.1f*p.Right, new Color32(255,0,0,255), 0.005f);
Lines.Add(p.position, p.position + 0.1f*p.Up, new Color32(0,255,0,255), 0.005f);
Lines.Add(p.position, p.position + 0.1f*p.Forward, Color32.White, 0.005f);
Found an issue with these docs, or have some additional questions? Create an Issue on Github!