
Lines.AddAxis
static void AddAxis(Pose atPose, float size, float thickness)
Displays an RGB/XYZ axis widget at the pose! Each line is extended along the positive direction of each axis, so the red line is +X, green is +Y, and blue is +Z. A white line is drawn along -Z to indicate the Forward vector of the pose (-Z is forward in StereoKit).
| Pose atPose | What position and orientation do we want this axis widget at? |
| float size | How long should the widget lines be, in meters? |
| float thickness | How thick should the lines be, in meters? |
static void AddAxis(Pose atPose, float size)
Displays an RGB/XYZ axis widget at the pose! Each line is extended along the positive direction of each axis, so the red line is +X, green is +Y, and blue is +Z. A white line is drawn along -Z to indicate the Forward vector of the pose (-Z is forward in StereoKit).
| Pose atPose | What position and orientation do we want this axis widget at? |
| float size | How long should the widget lines be, in meters? |
Examples
Identity Pose
The identity pose is a Pose at (0,0,0) facing Forward, which in
StereoKit is a direction of (0,0,-1) represented by a Quaternion of
(0,0,0,1). Note that a Quaternion of (0,0,0,0) is invalid, and can
cause problems with math, so using default or an empty
new Pose() with this struct can result in bad math results.
Pose.Identity is a good default to get used to!
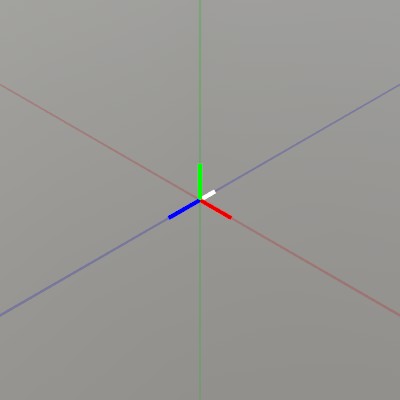
Note that Lines.AddAxis here shows the Pose orientation by
drawing the pose local X+ (red) Y+ (blue) Z+ (green) axis lines in
the positive direction, and Forward in white.
Pose pose = Pose.Identity;
Lines.AddAxis(pose);
// Show the origin for clarity
Lines.Add(V.XYZ(-1,0,0), V.XYZ(1,0,0), new Color32(100,0,0,100), 0.0005f);
Lines.Add(V.XYZ(0,-1,0), V.XYZ(0,1,0), new Color32(0,100,0,100), 0.0005f);
Lines.Add(V.XYZ(0,0,-1), V.XYZ(0,0,1), new Color32(0,0,100,100), 0.0005f);
Here’s a small example of checking to see if a finger joint is inside a box, and drawing an axis gizmo when it is!
// A volume for checking inside of! 10cm on each side, at the origin
Bounds testArea = new Bounds(Vec3.One * 0.1f);
// This is a decent way to show we're working with both hands
for (int h = 0; h < (int)Handed.Max; h++)
{
// Get the pose for the index fingertip
Hand hand = Input.Hand((Handed)h);
Pose fingertip = hand[FingerId.Index, JointId.Tip].Pose;
// Skip this hand if it's not tracked
if (!hand.IsTracked) continue;
// Draw the fingertip pose axis if it's inside the volume
if (testArea.Contains(fingertip.position))
Lines.AddAxis(fingertip);
}
Found an issue with these docs, or have some additional questions? Create an Issue on Github!